Mapping¶
The following steps are running on ROS2GO platform
Open a terminal, connect to your car.
First, set up ROS environment on both your car and your computer.
On your computer, config network variables by modifying your ~/.bashrc file:
gedit ~/.bashrc
in the text editor, add these two lines to the bottom of the file.
ROS_MASTER_URI=http://yourcarip:11311
ROS_IP=`hostname -I`
where “yourcarip” is the IP address of your car (192.168.50.10*).
On your car (first ssh -X to your car), config network variables by the same steps.
gedit ~/.bashrc
in the text editor, add these two lines to the bottom of the file.
ROS_MASTER_URI=http://yourcarip:11311
ROS_IP=`hostname -I`
where “yourcarip” is the IP address of your car (192.168.50.10*).
You can use the following code to check if your environment variables have been set correctly
echo $ROS_MASTER_URI
echo $ROS_IP
Get into your computer’s SLAM package
roscd racecar_slam
Update to the latest SLAM package
git pull origin master
Make the package
cd ~/catkin_ws
catkin_make
OK, now close all terminals and open new terminals to do the following steps.
Then ssh to your car and bring up everything on your car
roslaunch racecar_bringup racecar_bringup.launch
Then go back to your own computer and open a new terminal. Run the mapping launch file to start mapping
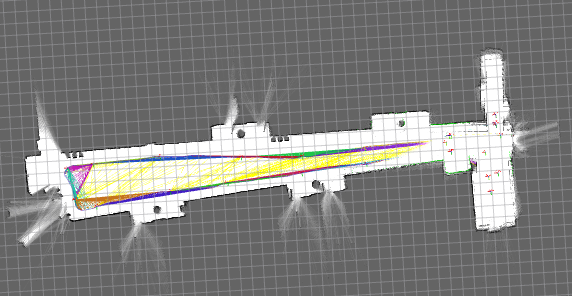
roslaunch racecar_slam racecar_laser_only_cartographer.launch
You should be able to see something like this
Tp save the map, open a new terminal and run
rosrun map_server map_saver --occ 51 --free 49 -f test_carto_map